[네이버랩스] 자율주행차 등 생활환경지능 기반 기술 공개
- 기자명 뉴스팀
- 입력 2017.03.30 16:16
- 댓글 0

네이버의 기술연구개발 법인 네이버랩스(대표 송창현)는 30일 일산 킨텍스에서 열린 '2017 서울모터쇼' 프레스데이에서 자율주행, 커넥티드 카, 3차원 실내지도 등 생활환경지능 기반 기술을 공개하며, 향후 공간과 이동에 대한 기술 방향성과 IVI 플랫폼 계획을 밝혔다.

이번에 공개한 네이버랩스 자율주행차는 국내 IT기업 최초로 국토부 도로주행 임시허가를 받은 차량으로 현재 실제 도로에서 실험 주행 중이다. 이 차량은 미국자동차공학회(SAE-Society of Automotive Engineers)의 자율주행 기준 레벨3 수준의 자율주행 기술을 갖추고 있으며, 완전자율주행(레벨4) 단계를 달성하기 위해 기술 개발 중이다.
네이버와 네이버랩스는 이번 2017 서울모터쇼에 ‘All Ways Connected, Always Intelligent'라는 컨셉을 바탕으로 1,000㎡의 전시공간을 마련하고 국토부 임시주행 허가를 받은 '자율주행차' , 연구개발 중인 차량용 인포테인먼트(IVI, in-vehicle infotainment, 이하 IVI) 시제품, 3차원 실내지도 맵핑 로봇 'M1' 공개 및 시연, 네이버 자동차 서비스의 차량정보 확인 체험 공간 등을 선보인다.
올 1월 네이버 연구개발 조직에서 별도 법인으로 독립한 네이버랩스는 '공간'과 '이동'에 대한 인텔리전스 연구에 본격적으로 집중하겠다는 계획을 밝혔다.
이를 위해 네이버랩스는 차세대 이동 솔루션을 연구하고 AI와 로봇기술의 융합을 통한 생활공간의 정보화를 지속하는 한편, 새로 개발 중인 IVI 플랫폼을 오픈해 더 많은 파트너와의 협력을 넓혀가는 방식으로 기술과 서비스의 선순환을 이루겠다는 비전을 제시했다.

(네이버랩스 기술을 소개하느 송창현 대표)
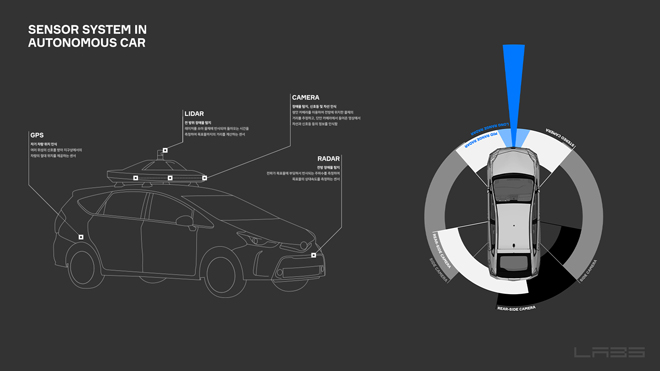
네이버랩스는 ‘인지’ 분야에 주목해 자율주행 기술을 연구 개발하고 있다. '인지'는 정밀한 자기 위치, 사물의 인식 및 분류, 상황의 판단 등 자율주행에서 핵심적인 감각기관과 두뇌의 역할로, 정보와 데이터의 분석 처리가 중요하다.
이번 모터쇼에서 네이버랩스는 딥러닝 기반의 이미지 인식 기술을 통해 도로 위의 사물과 위치를 정밀하게 파악해 차량의 경로를 계획하고, 측후방 영상에서 빈 공간을 판단해 차선 변경 가능 여부를 확인하는 등의 기술을 새롭게 선보였다.
네이버랩스는 자율주행 기술 발전은 실제 도로 주행을 통한 경험과 데이터를 쌓는 것이 필수적이기 때문에 실 주행 거리를 늘려가며 미래 이동성 개선과 도로 정보화 연구를 지속하는 동시에, 다양한 파트너와의 협업을 통해 기술 수준을 더욱 높여 나갈 계획이라 밝혔다.
네이버랩스는 카쉐어링 및 자율주행 시대에 맞춰 차량 내 개인 환경에 최적화된 인포테인먼트인 IVI 플랫폼과 이를 구현한 시제품을 공개했다.
IVI는 차 안에서 즐길 수 있는 엔터테인먼트와 정보 시스템을 총칭하는 용어로, 음악·영화·게임·TV 등과 같은 엔터테인먼트 기능과 내비게이션, 모바일 기기와 연동된 다양한 서비스를 제공하는 기기 또는 기술을 말한다.
이번 모터쇼에서 소개한 네이버랩스의 IVI는 주의분산이 최소화된 UX, 절제된 음성 인터페이스로 운전 환경에 적합하도록 설계되었으며, 네이버 로그인을 통해 어느 차량에서나 동일한 경험을 제공해준다. 네이버 지도와 연계된 내비게이션을 통해 저장해 놓은 목적지로 바로 길안내를 받을 수 있으며, 날씨·캘린더·뮤직·라디오 등 상황에 맞는 콘텐츠 활용이 가능하다. AI기술은 운전자의 음성을 인식해, 목적지 검색과 길 안내를 더 안전하고 편리하게 사용할 수 있도록 도와준다.

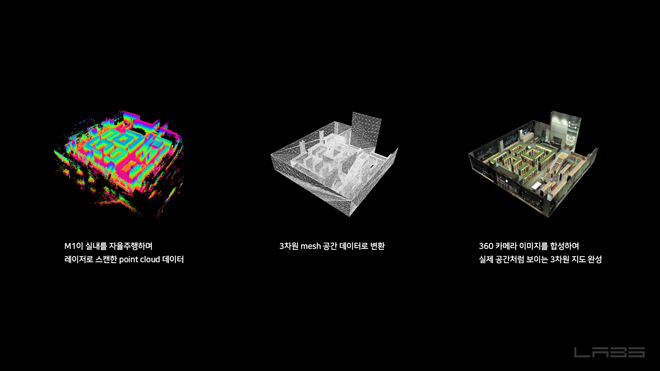
네이버랩스는 이번 서울모터쇼에서, 도로와 구조물로 이뤄진 모형 전시공간을 마련하고, 3차원 실내 정밀지도 제작 로봇인 ‘M1’이 자율주행으로 해당 공간을 이동하며 3D 정밀지도를 만드는 과정을 시연했다.
M1은 *real-time 3D SLAM, 자율주행, **photo-realistic 3D map generation 등을 활용해, 레이저로 스캔한 무수히 많은 점 데이터를 mesh라 불리는 3차원 공간 데이터로 변환, 카메라로 촬영한 이미지를 붙여 3차원 지도를 만들어낸다.
* real-time 3D SLAM : 레이저 스캐너를 이용하여 실시간으로 3차원 실내 지도를 만들고 지도 상에서 로봇의 위치를 파악하는 기술
** photo-realistic 3D map generation : 로봇이 3차원 레이저 스캐너와 360 카메라로 수집한 데이터를 기반으로 3차원 실내 지도를 만들어내는 기술
네이버랩스는 GPS가 잡히지 않는 실내공간의 디지털화를 위해 로봇 M1을 개발했다. M1으로 제작한 3D 정밀지도를 통해 대규모 실내공간에서도 현재 위치를 간단히 파악하고 길 찾기가 가능해지면, 부동산 정보·게임·광고를 비롯한 여러 공간 기반 서비스들의 핵심 플랫폼으로 활용될 수 있을 것이라고 덧붙였다.
